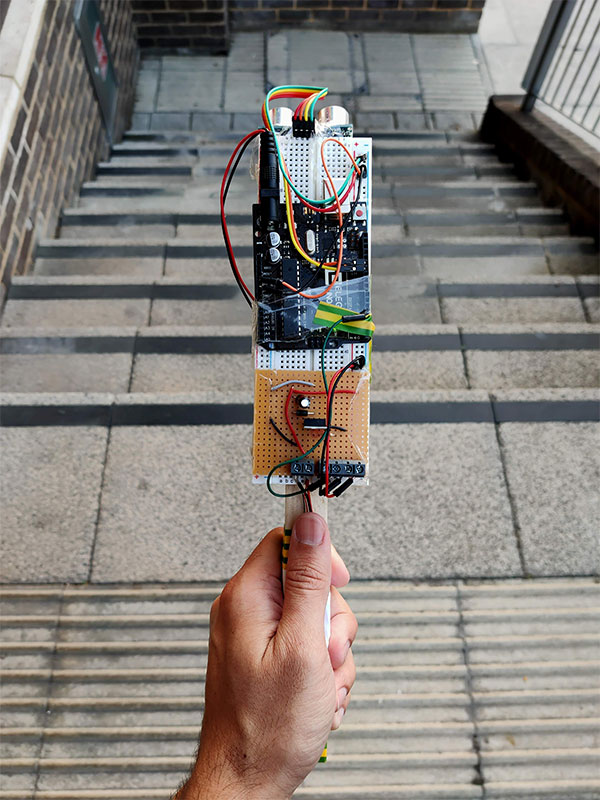
Milo
Calibrating the device

STEP 1
Measures the height at neutral, vertical position

STEP 2
Measure the distance to the ground at a comfortable angled position
About 17% of the global population live with some sort of visual impairment; with 217 million people having moderate to severe sight loss and 36 million people being completely blind. Yet their primary tool for travel, the white cane, has remained relatively unchanged, since its inception a century ago.
Currently there are only two primary modes of travel for people with visual impairment, with a cane or with the help of a guide dog. Most often people use a cane, because getting a guide dog can become a considerable commitment of time, money, and resources. For some people however, a fundamental deterrent to getting a guide dog is trust. It is the entrusting of one’s own safety to another being; a responsibility that is not taken lightly by many.
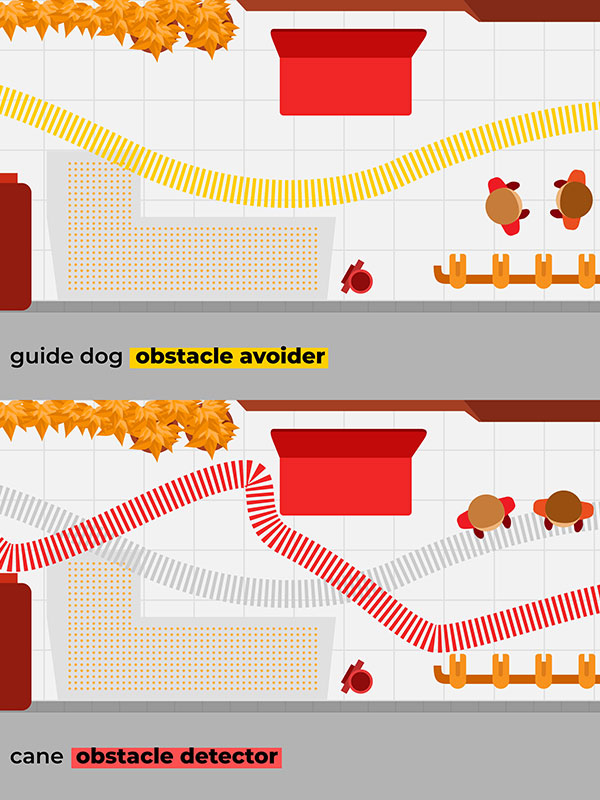
The key difference when travelling with a cane and with a guide dog is that a cane is an obstacle detector while a guide dog is an obstacle avoider. The latter enables a smoother path of travel, avoiding obstacles ahead of time with minimal disruptions. One can travel much faster with a guide dog, without needing total undivided concentration. Even with the other benefits of using a guide dog, like a broader range of sensing, threat detection and companionship, it is widely not considered worth it, at the cost of one’s independence.
Milo reimagines the cane, as a tool for mobility for people with visual impairment. It aims to create an obstacle avoider that retains the agency of the user.